Robotics
Unmanned Aerial Vehicles
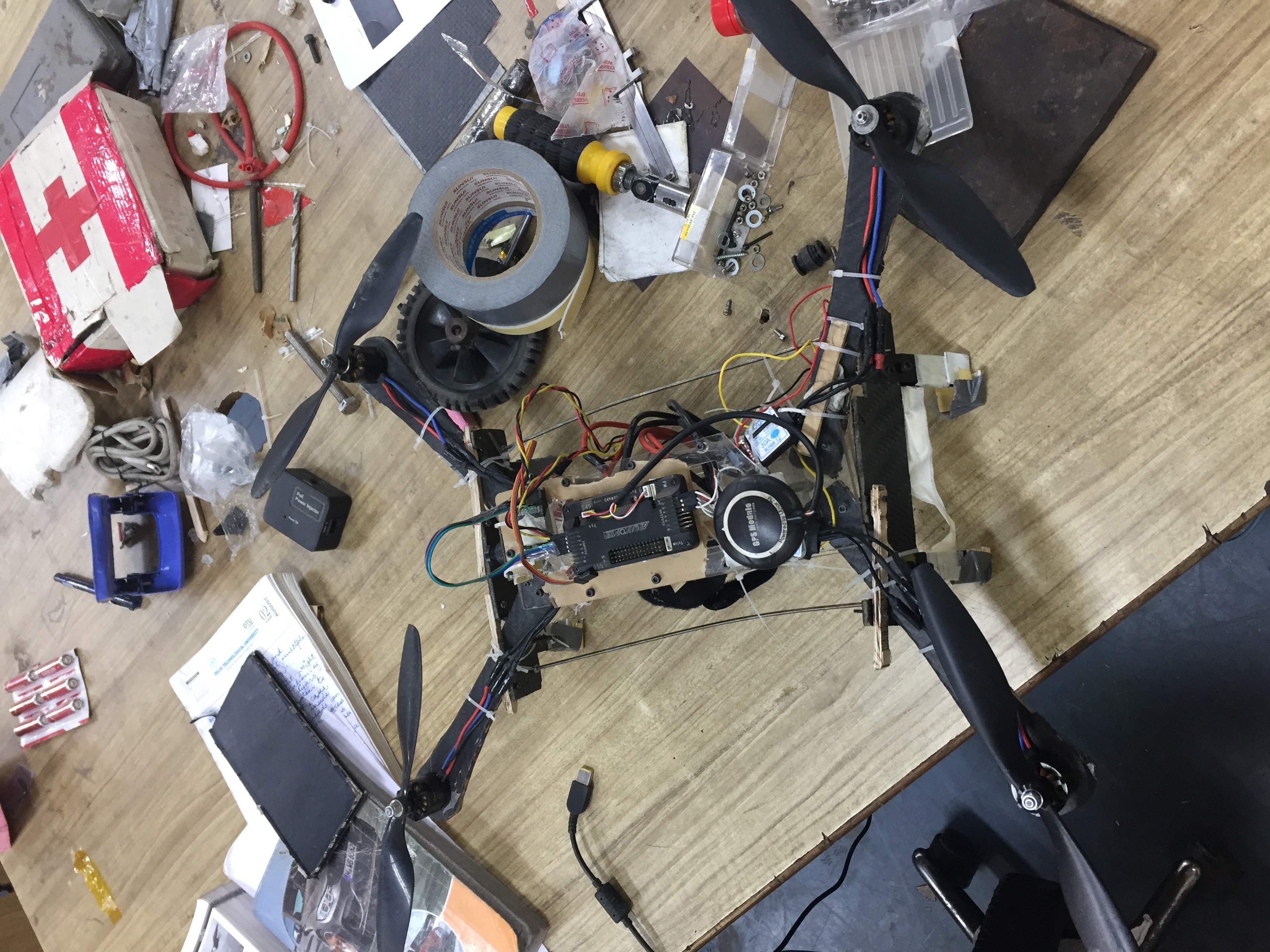
IRL Technoxian Quadcopter Challenge, World Robotics Championship, by International Robotics Council (IRC), 2017We built an indigeneous Light-Weight Sandwich Composite Multirotor System. As the Avionics Technician on the project, I was responsible for designing, integrating and testing the quadcopter's propulsion system and tuning the Naze flight controller. Report
|
|
|

|
AUVSI Student Unmanned Air Systems Competition, Maryland, USA, 2017UAS Lazarus Developed a customized Ardupilot firmware algorithm to capture the off-axis target using 2-axis gimbal stabilization for Lazarus. Did extensive flight testing of this feature for the AUVSI-SUAS competition. |
|

|

|
Robotics and Machine Intelligence LaboratoryReal-time object recognition system for autonomous navigation. Used the YOLO architecture and ZED stereo camera on Nvidia’s Jetson TX1 module to develop a system that provides real-time information about the identity of objects and their distance from the car using audio. Implementing YOLO in Pytorch from scratch: Code |
|